



| 分享到: | 更多 |

世界首个会说话的机器人“基博”是于2013年8月4日被送上太空的,用于陪伴航天员,免得他们在寂寥的太空中感到孤独寂寞。
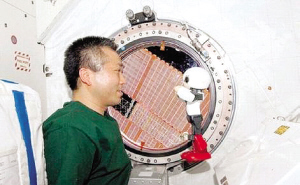
2013年12月6日,在希望号日本实验舱内,日本航天员若田光一与机器人“基博”(KIROBO)在国际空间站进行了对话实验。“基博”通过自带的摄像机识别出了若田的脸,它主动攀谈道:“你好,若田先生。”若田问:“对失重习惯了吧?”浮在空中的“基博”做出抬头挺胸的样子回答:“已经习惯了哦。”然后,它还与若田握了手。
缓解寂寞
世界首个会说话的机器人“基博”是于2013年8月4日被送上太空的,用于陪伴航天员,免得他们在寂寥的太空中感到孤独寂寞。若田于2013年11月开始其太空之旅,在2013年年底接任“国际空间站”站长。
“基博”(KIROBO)是在2400份参与竞争的名字中挑选而出的,取自日语“希望”的发音(kibo)和“机器人”的英文(robot)。由于无需从事体力工作,“基博”体型比进入太空的绝大多数机器人小。它高34厘米,宽18厘米,厚15厘米,质量1公斤,设计灵感来自家喻户晓的动画角色“铁臂阿童木”,可完成多种肢体动作。它在“国际空间站”协助航天员接受地面的指令,陪航天员说话,为航天员们解闷。“基博”可用日语同若田光一进行交流,帮助其工作,记录对话内容,并能从控制室向若田光一传递信息,也会让其他的航天员保持愉快的心情,还可拍照并且通过地球上的一个机器人兄弟更新它的微博账户,这是它作为一个“社会型机器人”的部分任务。
“基博”由著名机器人设计师高桥智隆设计,它会记住若田光一的长相,当他们在太空相聚时,“基博”可以认出他。最大的挑战是如何让该机器人适用于太空。为确保“基博”的可靠性,已进行了几十项测试,其中就包括模拟空间站的微重力环境,观察机器人能否正常活动等。“基博”在地球上还有一个“孪生”机器人,名叫Mirata,用于监测“基博”在太空中可能遇到的问题,通过语音指令,指导“基博”执行任务。
美国“大腕”
2011年2月24日,美国发现号航天飞机进行退役前的最后一次发射。发现号此行的任务之一就是为“国际空间站”送去首个类人形机器人——机器人航天员2号(R2)。从外表看,R2的形象酷似美国科幻电影《星战传说》中的机器人角色C-3PO。那么,该机器人有什么用呢?太空机器人航天员与其是对手还是伙伴?
价值250万美元的R2是美国航空航天局与通用公司联合研制的首个进入太空的仿真机器人,由头部、结实的身躯、两只超灵巧的臂膀和两只手构成,质量约140公斤,用于技术验证性演示,主要目的是协助航天员在国际空间站完成零星工作和维修任务,考察类人形机器人对在轨工作的航天员有多大帮助作用。
在把R2送到国际空间站后,首先要测试它是否能够在预期的零重力环境下正常工作,然后通过不同任务对它进行全面测试,其中包括操作柔韧、易弯曲织物,以及尽可能地帮助航天员完成一些太空事务。这款机器人将擦拭栏杆和清洁空气滤清器,目前这两项单调的任务是由“国际空间站”航天员来完成的。
今世前缘
众所周知,航天员出舱进行太空行走可以完成许多重要任务,例如,能检查、修理航天器,为航天器更换设备和添加燃料,捕捉报废的或发生故障需要修理的卫星,装配大型空间结构等。但由于舱外没有空气,人一旦暴露在太空中将面临失压、缺氧、低温和辐射损伤4大危险,所以必须穿保护身体的盔甲——舱外航天服。由于舱外航天服里充满着空气,鼓鼓囊囊的,所以穿上它行动非常不便,使人显得笨手笨脚,而且航天员长时间舱外活动不仅很累,也有一定风险。因此,航天专家就想到把机器人送上太空,来完成那些简单、危险的重复性劳动,而让人主要发挥他的高度智能的本领。
早在1967年4月,就诞生了第一个太空机器人,它是美国勘测者3号月球探测器上的机械臂。这个探测器的机械臂能在地面命令的控制下,在月面挖掘土壤,送入土壤分析器进行分析,以便为阿波罗载人飞船登月选择合适的着陆地点。
1970年9月,苏联成功地发射了世界上第一个取样返回机器人——月球16号探测器。它能接受地面的遥控命令,在月球表面行走,挖掘土壤,送入样品舱,然后带回地球。1970年11月,苏联的月球17号探测器把世界上第一台巡视机器人——月球车1号带到了月球。
1980年以后,美国航天飞机上的机械臂曾经多次施放、维修甚至回收卫星,工作得很出色。但是,这类只有手臂的机器人,没有头脑,没有躯干,完全靠人远距离操纵,所以是一种“发育”极不完全的雏形机器人。
1997年,美国火星探路者探测器将世界上第一台火星巡视机器人带到了火星。这是一辆取名为“旅居者”的小型火星车,只有微波炉大小。后来,美国又发射了更先进的火星巡视机器人,即火星车。
在轨服务
在轨服务是指在太空为轨道上运行的航天器添加燃料、补充气源、装拆结构部件和维修仪器设备等服务活动。这些任务通常需要由航天员走出座舱去完成,但一些简单的操作可由机器人代劳。
在轨服务机器人现已承担重任,比如航天飞机和国际空间站上所应用的加拿大机械臂,虽然它没有人的形状,但它是一个拥有部分智能功用的机器人。美国航天飞机的遥控机械臂长15.2米,由3节组成,末端是一个可伸缩的“手腕”,能搬运直径4.5米、长18米、质量29吨的有效载荷,完成了上百次的释放、回收卫星以及协助航天员在太空维修航天器的任务。
国际空间站上的可移动遥控机械臂长约17米,装在空间站主桁架的导轨上,能往返移动,扩大操作范围。它由6段子臂和7个带电动机的活动关节组成,起重能力达到160吨。其末端还有一个灵巧的多爪机械手“德克斯特”,能完成装配和拆卸结构零件以及维修设备等精细活儿。它已在“国际空间站”建造中立下汗马功劳,包括运送设备,补给物资,安装、维修仪器设备,为航天员的舱外工作提供支持。“国际空间站”上还装有日本和欧洲实验舱各自的专用机械臂。
随着机器人技术的发展和应用,在轨服务机器人将成为太空基础设施不可或缺的组成部分。它们活跃在太空中,执行喂哺“饥饿的”卫星、医治“有病的”卫星、埋葬“死亡的”卫星等多种任务,从而提高卫星的工作质量,延长工作寿命,降低运行成本,增强工作灵活性。
运送首个R2到“国际空间站”的目的,是想证明它在太空失重状态下与在地球上一样能运行良好,为今后更先进的太空机器人承担更繁重任务铺路。不过,首个R2进入空间站后,其活动范围起初局限在命运号实验舱内,进行微重力、站内辐射、电磁干扰等空间环境影响的测试与评估,因为它的保护能力还不足以承受空间站外的太空极端环境。随着技术进步,它在空间站内外活动的自由度可能增加。
按设计,R2将逐步从简单的任务进程中(如监测自身的健康)获得技能升级,进而有能力去完成更加复杂的工作。专家把和R2一起工作看成是在监管一名新来的员工或学生,因为起初需要给它许多细节方面的指导;随后就比较让人轻松愉快了,那些之前曾解决过的任何领域的问题,只要偶尔核对一下即可。专家称R2能感知并按需要去适应环境,是个机灵的家伙,在作用上拥有无限的可能性!
目前,专家还在继续改进R2,期望有一天让它利用外加的简易腿或轮子在一颗行星或小行星上行进,为人类勘测可着陆区域,或者帮助人类建立和拆卸工作站或居住点。它不但能和人类并肩作战,而且还可以在危险环境中表现得更出色,扩展人类探索太空的范围。
来源:《自然与科技》





