





ОЮИЛјЭК»ЖыіөөДХжХэЦЗДЬЈ¬МеПЦФЪБ¬ҪУЦ®ЦРЈҝ
ЎЎЎЎХвЖӘОДХВКЗЧчХЯ2ФВ·ЭРҙөДЈ¬іөФЖҫъСЫЧҫІЕҝҙөҪЈ¬ҪсМмЧӘФШІўЧцёцМЦВЫЎЈ
ЎЎЎЎЎҫЧчХЯТэЧУЎҝФЪ¶ФОпБӘНшҪйЙЬөДПа№ШҝОјюЦРЈ¬ОТҫӯіЈ»бДГОпБӘНшұщПдәНіөБӘНшАҙЧчОӘЦШТӘ°ёАэАҙЛөГчЎЈУР№ШОпБӘНшұщПдөД»°МвЈ¬ОТ2012ДкФшЧ«РҙБЛТ»ЖӘІ©ОДЎ°і©ПлОпБӘНшұщПдҙшАҙөДКэЧЦ»ҜЙъ»оЎұҪшРРБЛҪйЙЬЎЈТ»ЦұТІПлРҙТ»ЖӘУР№ШОЮИЛјЭК»ЖыіөәНіөБӘНшөДОДХВЈ¬МёМёОТЧФјәөДі©ПлЈ¬ө«Т»Цұұ»ЖдЛы»°МвЛщіеөӯБЛЎЈ
ЎЎЎЎЗ°јёМмёХТ»ҝЪЖш¶БНкТ»ұҫКйЎ¶іөБӘНшЈәҫцХҪөЪЛДЖБЎ·(ОТ¶ФёГКйУГәЬҙуЖӘ·щМёВЫФЪЖдЛы·ҪГжТСҫӯ·ЗіЈіЙКмУҰУГөДөзЧУЙМОсөДДЪИЭІ»ТФОӘИ»Ј¬ХвІў·ЗіөБӘНшөДМШЙ«әНёпГьРФұд»ҜЈ¬ОТҫхөГёь¶аУҰёГМЦВЫЖдЛы·ҪГжІўІ»ҫЯұё¶шЦ»УРЖыіөБ¬ҪУЖрАҙІЕУРөДРВМШРФ)Ј¬ЧтМмУЦҝҙөҪNatureЦРУРЖӘҪйЙЬОЮИЛЖыіөөДОДХВЎЈҝҙНкХвР©ЧКБПЈ¬·ўПЦРн¶аЖдЦРИПК¶УлОТФӯұҫеЪПлөДРн¶аДЪИЭПаөұТ»ЦВЎЈПЦФЪЦХУЪИМІ»ЧЎҪ«ХвР©ФЪҝОМГЙПЦШёҙБЛ¶аұйөДеЪПлХыАніцАҙБЛЈ¬Т»·ҪГжЛгКЗёҪәНТ»ПВХвұҫКйәНХвЖӘОДХВЈ¬БнТ»·ҪГжТІЧЬҪбТ»ПВОТөДЛјҝјЎЈ
ЎЎЎЎУЙУЪИЛАаөД№МУРИхөгЈ¬ұИИзИЭТЧЖЈАНЈ¬·ЦРДЈ¬»тЕцөҪҪфјұЗйҝцКұТтјӨ¶Ҝ¶шөјЦВУҰ¶ФК§ОуЈ¬өАВ·Ҫ»НЁКВ№КФјУР90%КЗУЙјЭК»ФұөДҙнОу¶ҜЧцТэЖрөДЎЈИз№ыҪ«ХвЦЦҝШЦЖИЁҪ»ёшөзДФЈ¬өДИ·КЗәЬг«ТвөДТ»јюКВ¶щЎЈ¶аЙЩДкАҙЈ¬І»РиТӘИЛХЖОХ·ҪПтЕМЎў»тХЯС№ёщҫНГ»УР·ҪПтЕМөДОЮИЛјЭК»КЗИЛГЗЛщПтНщөДЎЈЖыіөФЛРР№эіМЦРЈ¬іЛЧшИЛҝЙТФО§ЧшФЪТ»ЖрЈ¬әИІиЎўәИҫЖЎўБДМмЎўЙПНшЈ¬ҙто§ЛҜТІРРЎЈ

ЎЎЎЎОЮИЛјЭК»ЖыіөЦРөДг«ТвЙъ»оЈЁТэЧФNatureЈ©
ЎЎЎЎјёәхЛщУРөДЖыіөЦЖФмЙМәНөзЧУІъЖ·№«Лҫ¶јПлФЪХвёцБмУтУРЛщЧчОӘЈ¬Гж¶Ф2010Дк10ФВҝзҪзҪшИлЖыіөБмУтөĹȸ蹫ЛҫЈ¬ЛыГЗёРҫхідВъБЛМфХҪЎЈДҝЗ°Ј¬№ИёиөДОЮИЛјЭК»ІвКФіөТСРРК»БЛ20¶аНт№«АпЎЈУЙУЪ№«ЦЪ¶ФҙЛідВъБЛЖЪЕОЈ¬Рн¶аЖыіөЦЖФмЙМәНёч№ъХюё®¶јФЪХвёцБмУтЧўИлБЛҙуБҝЧКҪрЈ¬ПЈНыДЬјУЛЩХвёцҪшіМЎЈБ¬ГА№ъФЛКдІҝөД№ЩФұRichard Bishop¶јёРМҫЎ°ОТҙУАҙГ»УРјы№эҙУёЕДоөҪІъЖ··ўХ№ИзҙЛСёЛЩөДЎұЎЈҫЎ№ЬРн¶ајјКхМфХҪТАИ»ҙжФЪЈ¬ө«ҝӘ·ўЙМ¶јРЕРДВъВъөШЛөЛыГЗҝЙТФЗеОъөШҝҙөҪ№вГчөДЗ°НҫЈ¬ҙуІҝ·ЦОКМв»тИ«ІҝОКМв¶јУРБЛҪвҫцНҫҫ¶ЎЈ
ЎЎЎЎИзҪсөД№ИёиОЮИЛјЭК»ЖыіөЈ¬№ӨЧчЦРРиТӘЕдұёИ«Зт¶ЁО»ПөНіЈЁGPSЈ©ҪУКХЖчәНөзЧУөШНјЈ¬јҙөјәҪПөНіЎЈН¬Кұ»№Ри°ІЧ°Т»Р©АЧҙпХмІвХП°ӯОпЎўјӨ№вИэО¬ЙЁГи¶ФЦЬұЯ»·ҫіөДІвҫаөДЙиұёЈ¬»№УРДЬК¶ұрәмВМөЖЎўК©№ӨРЕәЕЎўРРИЛәНЖдЛыіөБҫөИ¶ФПуөДЙгПс»ъөИЎЈҙҰАнДЬБҰПаөұУЪјёёцЧАГжөҘФӘөДіөФШөзДФЈ¬ДЬјҜіЙЛщУРөДРЕПўЈ¬ҫц¶ЁЖыіөФЪІ»Н¬МхјюПВІЙИЎәОЦЦРРОӘЎЈ
ЎЎЎЎОӘБЛјхЙЩјЭК»Лг·ЁөДёәФШЈ¬№ИёиЖыіө»№Ч°ұёј«ЖдПкПёөДөШНјЈ¬УРЦъУЪЖыіөҪшРР·ЗіЈҫ«И·өДҝШЦЖЎЈУРИЛ¶ФХвёцОКМвМбіцЦКТЙЈ¬ТІҫНКЗЛөХвСщөДөШНјТӘЗуФшҫӯ¶ФХвёцөШ·ҪҪшРР№эёЯҫ«¶ИөДҝұІвЈ¬ПЮЦЖБЛЖдККУГ·¶О§ЎЈө«№ИёиЛЖәх¶ФҙЛідВъБЛРЕРДЈ¬№ИёиөШНјФЪ2013ДкөДЖыіөПоДҝЦРҫНҝӘКјБЛХв·ҪГжөДЕ¬БҰЈ¬А©Х№өҪКАҪ繫·ІўІ»КЗәЬДСөДКВ¶щЎЈ
ЎЎЎЎ¶ФУЪЖыіөјЭК»ЦР·ЗіЈГчИ·өДОКМвАҙЛөЈ¬ЛЖәхИЭТЧҪвҫцЎЈұИИзЖыіөФЪК®ЧЦВ·ҝЪөДОКМвЈ¬УкәуВ·Гжұ们өДОКМвЈ¬ХвР©ГчПФөДМфХҪПЦФЪТСҫӯ¶јәЬәГөШөГөҪБЛҪвҫцЎЈө«КЗЈ¬ЖыіөФЪКөјКјЭК»№эіМЦРЈ¬»№УРЦо¶аІ»М«іЈјы»тІ»ҙуҝЙДЬөДКВјюЛщЧйіЙөДЎ°іӨОІЎұЎЈ№ИёиЖыіөІвКФ№эіМЦРЈ¬јЗВјПВБЛРн¶а№Е№Ц¶шәұјыөДКВјюЈ¬ИзЛЬБПҙьҙө№эёЯЛЩ№«В·»тәбШЁФЪөАВ·ЦРСлөДЙі·ўЎЈПФИ»Ј¬АаЛЖөДКВјюКЗОЮ·ЁЗоҫЎөДЎЈ
ЎЎЎЎДҝЗ°Ј¬ҙҰАнХвР©әұјыКВјюөДОЁТ»°м·ЁКЗҫЎБҝҪшРРјЗВјЈ¬ФЪёЯРФДЬ»ъЖчС§П°Лг·ЁөД°пЦъПВЙијЖУҰ¶ФҙлК©Ј¬И»әуҪшРРДЈДвІвКФЈ¬»тХЯКөјКҪшРРВ·ІвЎЈХвСщөД№ӨЧчЧцөГФҪі№өЧЈ¬ИнјюҫНФҪ»бұдөГПсУЕРгјЭК»ФұТ»Сщ°ІИ«Ј¬¶шЗТЧоәу»бёь°ІИ«ЎЈХвРиТӘ»Ё¶аіӨКұјдИФИ»КЗТ»ёцРь¶шОҙҫцөДОКМвЎЈ№Иёи№АјЖФјРиТӘ5ДкКұјдЎЈ
ЎЎЎЎЙПКцХвР©Е¬БҰЈ¬ЛЖәхКЗЦВБҰУЪИГіөұҫЙнұдөГёьҙПГчЈ¬ө«ИзәОУлКөјКөДіЎҫ°ҪбәПИФИ»ҙжФЪРн¶аА§ДСЎЈұИИзЈ¬өШНјКэҫЭІЙјҜІ»НкХыЈ¬ЖыіөОЮ·Ёј°Кұ¶ФөұПВөДВ·ҝцЧціцЧФјәөДЕР¶ПЎЈ№ИёиФЪ2012ДкҫНұнКҫОЮИЛјЭК»ФЪјјКхЙПТСГ»УРКІГҙДС¶ИЈ¬И»¶шАлКөПЦХжХэөД°ІИ«ЎўёЯР§өДОЮИЛјЭК»»№РиТӘёь¶аөДН»ЖЖЎЈ
ЎЎЎЎұрНьБЛЈ¬ОТГЗТСҫӯҪшИлБЛҙУ»ҘБӘНш·ўХ№өҪОпБӘНшөДКұҙъЈ¬КЗҙуКэҫЭЎўФЖјЖЛгәНОпБӘНшИэјЭВніөІўҪшөДКұҙъЎЈИз№ыФЪЖыіөЧФЙнЦЗДЬөД»щҙЎЙПФЩјУЙПНшВз»ҘБӘЈ¬ИГХвР©Ҫ»НЁ№ӨҫЯПа»ҘЦ®јдДЬ№өНЁҪ»БчЈ¬ДЗУЦҪ«КЗәОЦЦЗйРОДШЈҝҝЙТФФӨІвЈ¬ХвҪ«»бПсЖдЛыОпБӘНшЙиұёТ»СщЈ¬ИГ1+1өД№ҰДЬФ¶Ф¶ҙуУЪ2Ј¬Ц»ЕВДгөДПлПуБҰІ»№»БЛЎЈ
ЎЎЎЎІ»№эЈ¬ұҫОД»№КЗПлҫЎБҰПлПуТ»ПВЎЈХвЦЦИГіөУліөЎўіөУлВ·ЎўіөУл»щХҫЎўіөУлИЛЎўіөУлҙ«ёРЙиұёөИҪ»»ҘЈ¬КөПЦіөБҫУ빫ЦЪНшВзҪшРРТЖ¶ҜНЁС¶өДПөНіЈ¬·әіЖОӘіөБӘНшЈЁInternet of VehicleЈ¬IOVЈ©ЎЈҫЯМеөҪЖыіөөДНЁС¶ЙПЈ¬°ҙХХУлЖыіөҪ»»ҘөД¶ФПуЈ¬Т»°г·ЦОӘV2XЈЁVehicle to XЈ©Ј¬Vehicle to InfrastructureЈЁV2IЈ©әНV2VЈЁVehicle to VehicleЈ©ЎЈ
ЎЎЎЎV2XЈ¬јҙіөУлНвҪзРЕПўөДҪ»БчЈ¬ДҝЗ°іЙКмөДөјәҪПөНіЈЁ°ьАЁGPSҪУКЬЖчЎўВ·ҝцРЕПўәНЧојСөАВ·СЎФсөИЈ©ҫНКЗТ»ёцЦШТӘөДіыРОЎЈө«ХвёцјјКхДҝЗ°Ц»КЗөҘПтҪУКЬІў¶АБў·ЦОцРЕПўЈ¬ІўІ»ҙжФЪУЪЖдЛыЙиұёөДҪ»»ҘЎЈИз№ыЖыіөЦЗДЬЦХ¶ЛДЬҪ«ЧоәуҫцІЯөДРРК»јЖ»®ҙ«өЭёшЖдЛыЙиұёЈ¬ДЗГҙҫНСЭұдіЙV2I»тХЯV2VБЛЎЈПИАҙЛөЛөV2I°ЙЈ¬ХвКЗЖыіөУлҪ»НЁ»щҙЎЙиК©Ц®јдөДҪ»БчЎЈУЙУЪКЗЛ«ПтНЁС¶Ј¬ЖыіөІ»ФЩКЗҪцҪцұ»¶ҜҪУКЬҪ»НЁРЕәЕөЖөДЦёКҫЈ¬ТІҝЙТФЦч¶ҜПтЦЗДЬҪ»НЁРЕәЕөЖ·ўІјЗлЗуЈ¬ТӘЗуөчХыІ»Н¬өАВ·өДҪ»НЁГЬ¶ИәНәмөЖөДөИҙэКұјдЎЈ
ЎЎЎЎV2VјјКхЧоФзФЪ2006ДкФЪНЁУГЖыіө№«ЛҫөДҝӯөПАӯҝЛЙПЧцБЛХ№КҫЎЈДЗёцКұәтөДёЕДоЦ»КЗПлИГV2VЧцјЭК»ФұөДөЪ¶юЛ«Ў°СЫҫҰЎұЈ¬ХвҙУАнВЫЙПҝЙҪөөНјЭК»ФұТтЧўТвБҰ·ЦЙў»тДЬјы¶ИөНКұЛщФміЙөДҪ»НЁКВ№КЎЈПЦФЪЈ¬ИЛГЗ¶ФХвёцјјКхМбіцБЛёьёЯөДТӘЗуЎЈ
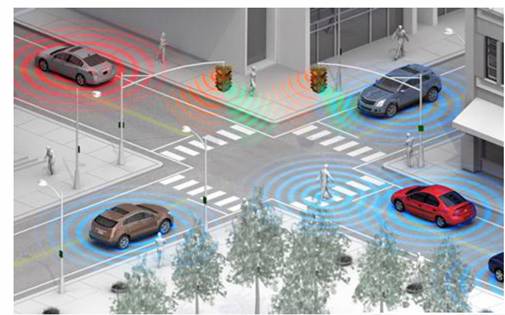
ЎЎЎЎИз№ыХыёцөАВ·ПөНі¶ј°ІЧ°БЛХвР©Ч°ЦГЈ¬іөБҫУліөБҫЦ®јдКөПЦНЁС¶Ҫ»»ҘЈ¬ҫНОӘЖыіөРРК»ҙшАҙЦч¶Ҝ°ІИ«РФЈ¬¶шЗТ»№ГЦІ№БЛПс№ИёиОЮИЛјЭК»ЖыіөХвАаТААөКУЖө·ЦОцјјКхәНөШНјЧКФҙөДҫЦПЮЎЈХвТ»јјКхёЕДоТСҫӯФЪЕ·ГЛҪшРРБЛКөІвЈ¬ЖыіөБ¬ҪУіЙТ»ҙ®Ј¬ҫНПсРЎСјёъЧЩЛьГЗөДДёЗЧТ»СщЎЈЗ°ГжөДіөБҫФЪХмІвөҪәмөЖ»тРРИЛКұДЬј°КұНЁЦӘәуГжөДіөБҫҪөЛЩЎЈУцөҪҪфјұЗйҝцЈ¬УЙУЪГҝБҫіө¶јјёәхФЪН¬Т»КұјдҪУКЬөҪБЛХвёцРЕәЕЈ¬ІўјёәхФЪН¬Т»КұјдІИПВЙІіөЈ¬ҫНұЬГвБЛөјЦВФЦДСөД»¬РРЎЈ

ЎЎЎЎФЪРн¶аөАВ·ЙПЈ¬ОТГЗ¶ј»бҝҙөҪТ»ёц°ІИ«МбКҫЕЖЈәЎ°ұЈіЦҫаАлЈ¬ЧўТвЙІіөЎұЈ¬ФЪёЯЛЩ№«В·ЙПТФ100№«АпөДЛЩ¶ИРРК»Ј¬ҫНТӘұЈіЦЦБЙЩ100ГЧөДҫаАлЈ¬ПВУкөДКұәт»№ТӘҪөөНЛЩ¶И»тХЯұЈіЦёьіӨөДҫаАлЎЈХвКЗТтОӘЖыіөЦ®јдГ»УРБ¬ҪУЈ¬Па»ҘЦ®јдІўІ»ЦӘөА¶Ф·ҪөДТвНјЈ¬әуХЯЧЬКЗТӘ»ЁИҘІ»ЙЩКұјдНкИ«АнҪвЗ°іөөДТвНјәуЈ¬ІЕДЬІЙИЎәуРшөДҙлК©Ј¬ХвФЪәЬҙуіМ¶ИЙПҪөөНБЛөАВ·өДНЁРРР§ВКЈ¬ІўјхЙЩБЛОЮ¶ЛЙІіөөДДЬәДЎЈ
ЎЎЎЎПа·ҙЈ¬Из№ыЖыіө»ҘБӘБЛЈ¬ДЗГҙҫНДЬНіТ»ІҝКрЈ¬І»№ЬКЗҙУЖф¶ҜөҪНЈіөЈ¬»№КЗҙУНЈ¶ЩЧҙМ¬ФЩҙОҪшИлҝӘ¶ҜЧҙМ¬Ј¬ЛьГЗјёәхҝЙТФН¬КұҪшРРЈ¬ҫНПсЖыіөЧйіЙөДБРіөН¬ІҪҪшРРЎЈФЩҝҙТ»ёцАэЧУЈ¬Ҫ»НЁУө¶ВөДКұәтЈ¬ЖыіөРРК»»әВэЈ¬ЖҪҫщГҝБҫіөХјУГөАВ·өДКұјдФцјУЈ¬ИГУө¶ВС©ЙПјУЛӘЈ¬НЁРРР§ВКФҪАҙФҪөНЎЈИз№ыЖыіөЛЩ¶ИјУҝмБЛЈ¬Ҫ«ј«ҙуөШ»әҪвХвёцГ¬¶ЬЈ»Из№ыЖыіөЦ®јд¶јДЬ№»Па»ҘНЁС¶Ј¬ДЗГҙЛьГЗҫНІ»ұШФЩҝӘҝӘНЈНЈБЛЈ¬јёәхЧЬДЬТФЧојСөДФЛРРЛЩ¶ИРРК»ЎЈИз№ыФЩҝјВЗЖыіөРРК»өДҝХЖш¶ҜБҰС§ОКМвЈ¬ҝЙТФҪЪКЎЦБЙЩ10%өДИјБППыәДЎЈ
ЎЎЎЎИҘДк9ФВЈ¬НЁУГЖыіөРыІјҪ«ФЪОҙАҙөДРНәЕЦРЦ§іЦV2VјјКхЎЈГА№ъ№ъјТ№«В·Ҫ»НЁ°ІИ«№ЬАнҫЦТІЧјұёФЪҪь10Дк·ўІјөДРВЖыіөЦР°ІЧ°V2VөД№ж¶ЁЎЈ
ЎЎЎЎҝЙјыЈ¬ОЮИЛјЭК»ЖыіөөДХжХэЦЗДЬЈ¬КЗМеПЦФЪБ¬ҪУЦ®ЦРөДЎЈИз№ыОТГЗҪ«ХвёцБ¬ҪУЈ¬МШұрКЗV2IФЩҪшТ»ІҪі©ПлҝӘАҙЈәФЪФЖөДКұҙъЈ¬УҰёГУРТ»ёцФЖ¶Л·юОсЖчЈЁХвАпОТГЗҝЙТФіЖЦ®ОӘЎ°Ҫ»НЁөч¶ИЧЬ№ЬјТЎұЈ©Ј¬өАВ·ЙП¶ј°ІЧ°БЛНЁС¶РФДЬј«јСөД»щХҫЈ¬ҝЙТФЛжКұУлЖыіөҪшРРёЯЛЩНшВзөДБ¬ҪУЎЈДЗГҙЈ¬ЖыіөөДФЛРРЧҙҝцЛжКұКЬЧЬ№ЬјТөДЦ§ЕдәНөч¶ИЈ¬әЬГчПФҝЙТФИГөАВ·Ҫ»НЁёьјУУЕ»ҜЈ¬ЙхЦБУРГ»УРәмВМөЖ¶јКЗҙОТӘөДЎЈөұИ»Ј¬ФЪХвЦЦИ«НшВзёІёЗөДөАВ·»№Г»УРНкИ«ҪЁіЙЦ®З°Ј¬ЙПКцөДV2XәНV2VјјКхУҰёГ»№УРТ»¶ОКұјдөД№э¶ЙЖЪЈ¬¶шЗТЦ»КЗ№э¶ЙЖЪЎЈ
ЎЎЎЎіөФЖ№ЫөгЈә
ЎЎЎЎЖыіөОҙАҙөД·ўХ№·ҪПтЈ¬КЗЧФ¶Ҝ»ҜЈ¬ЦЗДЬ»ҜУл»ҘБӘ»ҜЈ¬ЧчХЯөД№ЫөгЖдКөУліөФЖҫъөДИПК¶ІўІ»Г¬¶ЬЎЈЎ¶іөБӘНшЈәҫцХҪөЪЛДЖБЎ·ХвұҫКйЈ¬КЗ2014Дк4ФВіөФЖНшө®ЙъТ»ЦЬДкКұіц°жөДЈ¬ДЪИЭКЗ2013Дк4ФВөҪ2014ДкДкіхіөФЖНшҫ«Ж·ДЪИЭөДјҜәПУлЧЬҪбЎЈө«КЗЈ¬ЧчХЯИПОӘЈ¬Ў¶іөБӘНшЈәҫцХҪөЪЛДЖБЎ·УГәЬҙуЖӘ·щМёВЫФЪЖдЛы·ҪГжТСҫӯ·ЗіЈіЙКмУҰУГөДөзЧУЙМОс,іөФЖҫъІ»ёТ№¶Н¬ЎЈ
ЎЎЎЎҫНДҝЗ°АҙҝҙЈ¬ОҙАҙөДЦЗДЬЖыіөУРБҪҙу·ҪПтЈ¬өЪТ»КЗЖыіөЧФЙнөДЦЗДЬ»ҜЈ¬ИГЖыіөЧг№»ҙПГчЈ¬ДЬ№»ПсИЛТ»СщЈ¬УҰ¶ФөАВ·ЙПөДёчЦЦН»·ўЧҙҝцЎЈөЪ¶юКЗЦЗДЬјУ»ҘБӘЎЈХвЦЦ·ҪПтёьјУЗҝөчУЪ»ҘБӘ»ҜЈ¬ЖыіөұҫЙнөДЦЗДЬЈ¬Ц»РиТӘУҰё¶ЦҙРРІгГжөД№ӨЧчЈ¬Ў°ЛјҝјЎұөД№ӨЧчУЙФЖ¶ЛҙуДФИҘНкіЙЎЈХвБҪЦЦ·ҪКҪөДЧоҙуІоұрЈ¬ҫНФЪУЪ¶ФV2XөДТААөРФЎЈЧчХЯИПОӘәуТ»ЦЦ·ҪКҪҙъұнЧЕОҙАҙЈ¬ХвөұИ»ІўІ»ДЬЛгҙнЎЈ
ЎЎЎЎө«ұШРлТӘИПК¶өҪөДКЗЈ¬ФЪ»ҘБӘҪ»НЁЙиК©Г»УРЧјұёәГЦ®З°Ј¬ҫЯұё¶АБўЛјҝјөДЦЗДЬ»ҜЖыіөЈ¬ФЪПЦҪЧ¶ОёьјУҫЯУРЖХј°»ҜөДЗ°ҫ°ЎЈТӘЦӘөАЈ¬»ҘБӘҪ»НЁЙиК©өДЖХј°Ј¬»№ІўІ»ДЬТвО¶ЧЕОЮИЛјЭК»КұҙъөДөҪАҙЈ¬ұПҫ№ЖыіөКРіЎөД·ўХ№КЗТ»ёцҪҘҪшөД№эіМЈ¬әЬ¶аПЦУРЖыіөІўІ»ҫЯұёБӘНшөДДЬБҰЎЈ¶шТӘ¶ФХвР©ЖыіөҪшРРБӘНш»ҜёДФмЈ¬іЙұҫУЦ·ЗіЈёЯЎЈЛщТФЈ¬јҙұг№ИёиөДОЮИЛјЭК»Жыіө»№РиТӘОеДкІЕДЬХжХэЧЯПтБҝІъ»ҜЈ¬ФЪЛЩ¶ИЙПТІҝЙДЬ»бёЯУЪТААөV2XөД·ҪКҪЎЈ






- Іҝ·ЦіөЖуТюВчИұПЭОҙХЩ»Ш ЦКјмЧЬҫЦҪ«јУЗҝја№Ь
- ёЯөөЖ·ЕЖИлГЕј¶РЎіө ЦР№ъПы·СХЯЖҫКІГҙВтөҘ
- іөҙыПЭЪе¶а іМРт·ұІҪІҪҫӘРД
- №ъјТј¶ійІйПФКҫ Жыіө¶щНҜЧщТОЖЯіЙІ»әПёс
- ЖжИрРВіөКЧұЈЗ°ИэҙОВ©УН РЮіө4Sөкҫ№·ЗХжЙн
- ОеБёТә№«іөБҪМмЕДіц1448Нт »рұ¬іМ¶ИҪөөН
- іӨіЗёЯөч№«ІјПъБҝДҝұк »ШУҰФціӨУцЖҝҫұЦКТЙ
- Иэ°ьіцМЁ°лДкНЛ»»ұИАэҪцБҪіЙ јш¶ЁДСіЙО¬ИЁ...
- МэұҰВн¶ӯКВМёBMWЖыіөөДЎ°БнТ»ГжЎұ
- ГА№ъЧЁТөЕЬіөЦЖФмЙМИшБЦ»тҪсДкҙәИл»Ә
- ОЮИЛјЭК»ЖыіөөДХжХэЦЗДЬЈ¬МеПЦФЪБ¬ҪУЦ®ЦРЈҝ
- 9ФВХэКҪББПа Л№ҝВҙпРВЛЩЧр№ЩНј·ўІј
- іөКРЧӘРЬ ҫӯПъЙМДұ»®ЧӘұдУӘПъДЈКҪ
- ЖҪРРҪшҝЪіөЖХұйУцАдҫЩІҪО¬ји
- №ЫөгЈәЙМТөіөПХёДёпИЛРФ»ҜН№ПФ
- ЙПәЈНЁУГХэКҪёьГыЙПЖыНЁУГ ЙПәЈҙуЦЪИФОҙ¶Ҝ
- әПЧКЖ·ЕЖіөЖуОӘәОК§КШРЎРНSUVЗ°5Гы
- Вт¶юКЦіөИзәОЙёСЎЎ°КВ№КіөЎұ УЕПИСЎҙуЖ·ЕЖ
- З·ИұіПТвORУӘПъК§ІЯ РВВҘАј»Ш№йЗ°НҫОҙІ·
- ЙПәЈөз¶ҜЖыіөідөзЙиК©РВ№ж 7ФВ1ИХЖрКөК©
- ұЈКұҪЭКХ№әҙуЦЪЛЯЛПұ»Іө»Ш
- ЧојС¶юКЦіө ·бМпЙП°с
- ҝЛАпГЧСЗ¶Ҝөҙ¶нёЈМШНЈІъ
- ФЩОЕЕУҙуұ»Н¶ЛЯЈәҫА·ЧұйІјК®УаКЎЙж°ёҪр¶о№эТЪ
- ПИСпәуТЦЈ¬ДЙЦЗҪЭҫҝҫ№ФвУцБЛКІГҙДСМвЈҝ
- Іҝ·ЦіөЖуТюВчИұПЭОҙХЩ»Ш ЦКјмЧЬҫЦҪ«јУЗҝја№Ь
- ҙЮЦУЦІ·Е»°ЈәЛ«БъДкПъ5НтМЁҫНҝјВЗ№ъІъ
- НЁУГТтЖыіөИұПЭХЩ»ШОКМвФвГА№ъЛҫ·ЁІҝРМКВөчІй
- ИХІъ2013ІЖДкФЪ»ӘАыИуУРНыФціӨ30%
- Д®КУПы·СХЯ ёЈМШЎўұҰВнЎўВ·»ўіЙН¶ЛЯЦШөг
ҫ©ICPЦӨ100580әЕ | »ҘБӘНшРВОЕРЕПў·юОсРнҝЙЦӨ (1012009003) | ҫ©№«Нш°Іұё110401200155 | ЦР№ъ»ҘБӘНшКУМэҪЪДҝ·юОсЧФВЙ№«Фј
№гІҘөзКУҪЪДҝЦЖЧчҫӯУӘРнҝЙЦӨ(№гГҪ)ЧЦөЪ185әЕ | РЕПўНшВзҙ«ІҘКУМэҪЪДҝРнҝЙЦӨ(0111630)
№ШУЪОТГЗ | №гёж·юОс | БӘПөОТГЗ | ұҫХҫөШНј | Н¶ёеУКПд | °жИЁЙщГч
Copyright ? 2008-2012 by www.workercn.cn. all rights reserved